
Investigación en IBERO Puebla
Explore nuestras contribuciones y publicaciones que posicionan a la IBERO Puebla como un actor clave en la tecnología en México.
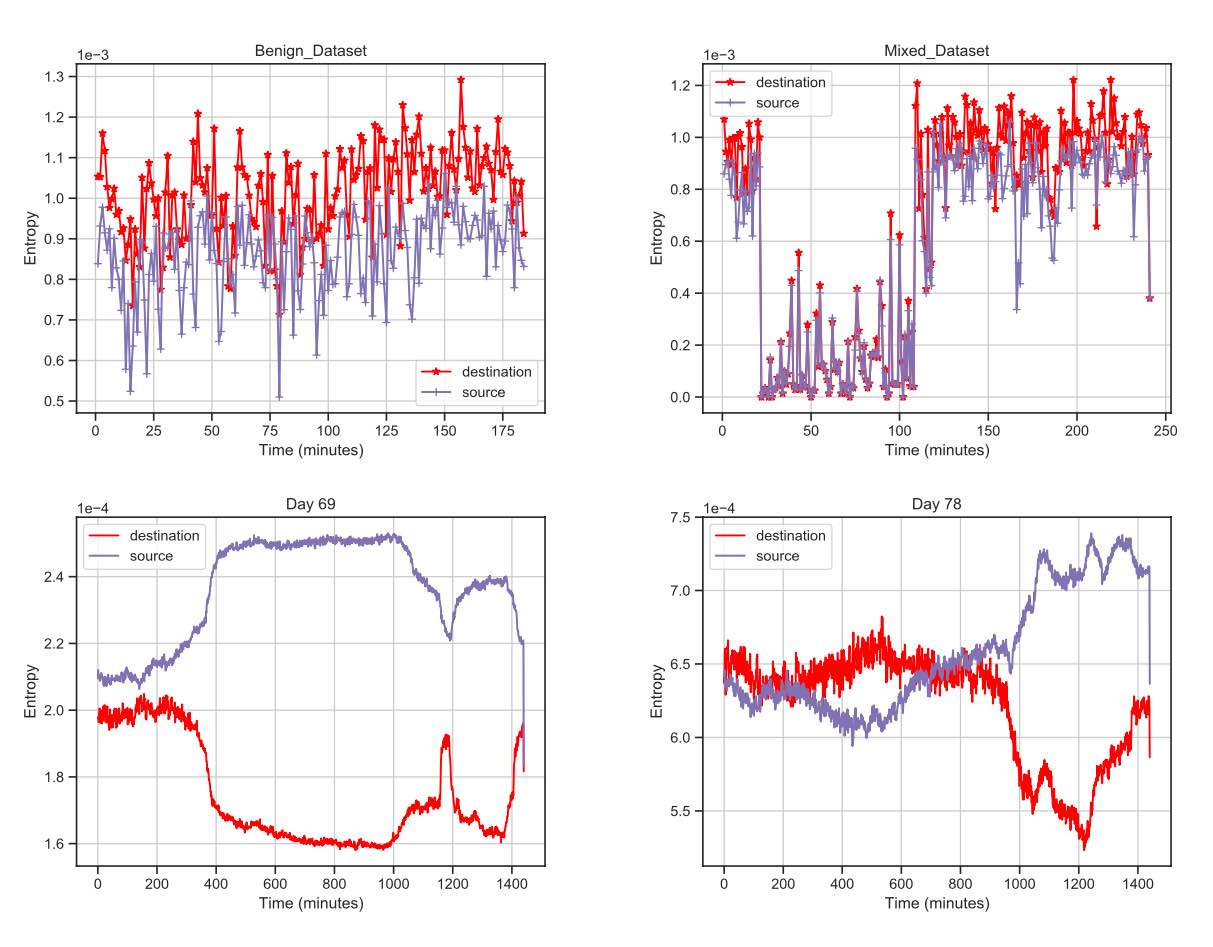
Máximo Nájera Medina, Antonio Miguel Martínez Martínez, Huber Girón Nieto
2025 IEEE Mexican Humanitarian Technology Conference (MHTC), 2025
This paper presents an adaptive detection framework for DDoS attacks using a hyper-parameter-tuned Random Forest classifier on high-fidelity synthetic network traffic, achieving an AUROC of 0.994. The study provides a rigorous baseline for future validation on live traffic.

Guillermo Michel González, Salvador Castro Reynoso, José Pablo Hernández Alonso, Máximo Nájera
2024 IEEE International Conference on Engineering Veracruz (ICEV), 2024
This study presents an AI-assisted prototype to enhance efficiency in surgical procedures, addressing the critical shortage of surgical instrument nurses. The system uses YOLOv8 and MediaPipe for object and hand recognition, enabling a UR5e collaborative robot to assist in surgical instrumentation.

Carlos Ernesto Camacho González, Juan David García Cortez, Rodrigo Huerta Ramírez, Rodrigo Miranda Flores, Huber Giron Nieto, Máximo Nájera
2025 IEEE Mexican Humanitarian Technology Conference (MHTC), 2025
This study compares two AI models for fire detection in images for security drone integration. It evaluates Google Teachable Machine and a custom Google Colab model, finding the Colab model has a higher detection rate while Teachable Machine is easier to implement.
Jesús León Hernández Martinez, Andrea Solano López, José Carlos Valencia Vázquez, Huber Girón Nieto, Máximo Nájera
2025 IEEE Mexican Humanitarian Technology Conference (MHTC), 2025
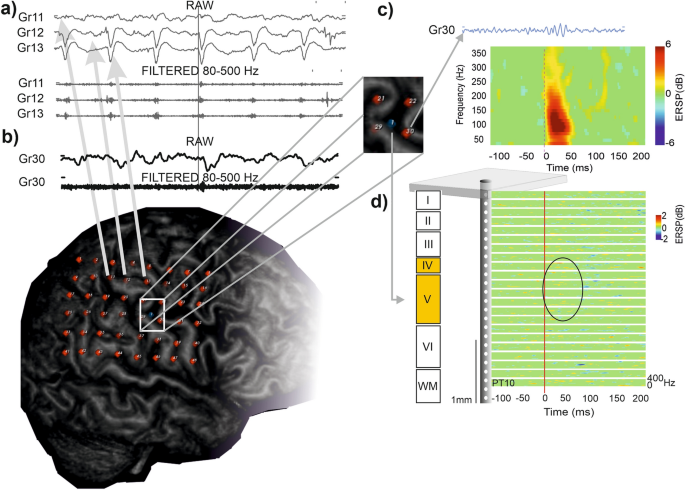
This paper presents a portable IoT seizure detection system attached to a waist belt. It uses a gyroscope to identify abrupt movements and an ESP32-S3 with an MPU6500 IMU for real-time analysis, sending immediate alerts via a Telegram bot.
Danna Paola García Sánchez, Oscar Hernández González, Selene Román Celis, Huber Giron Nieto, Máximo Nájera
2025 IEEE Mexican Humanitarian Technology Conference (MHTC), 2025
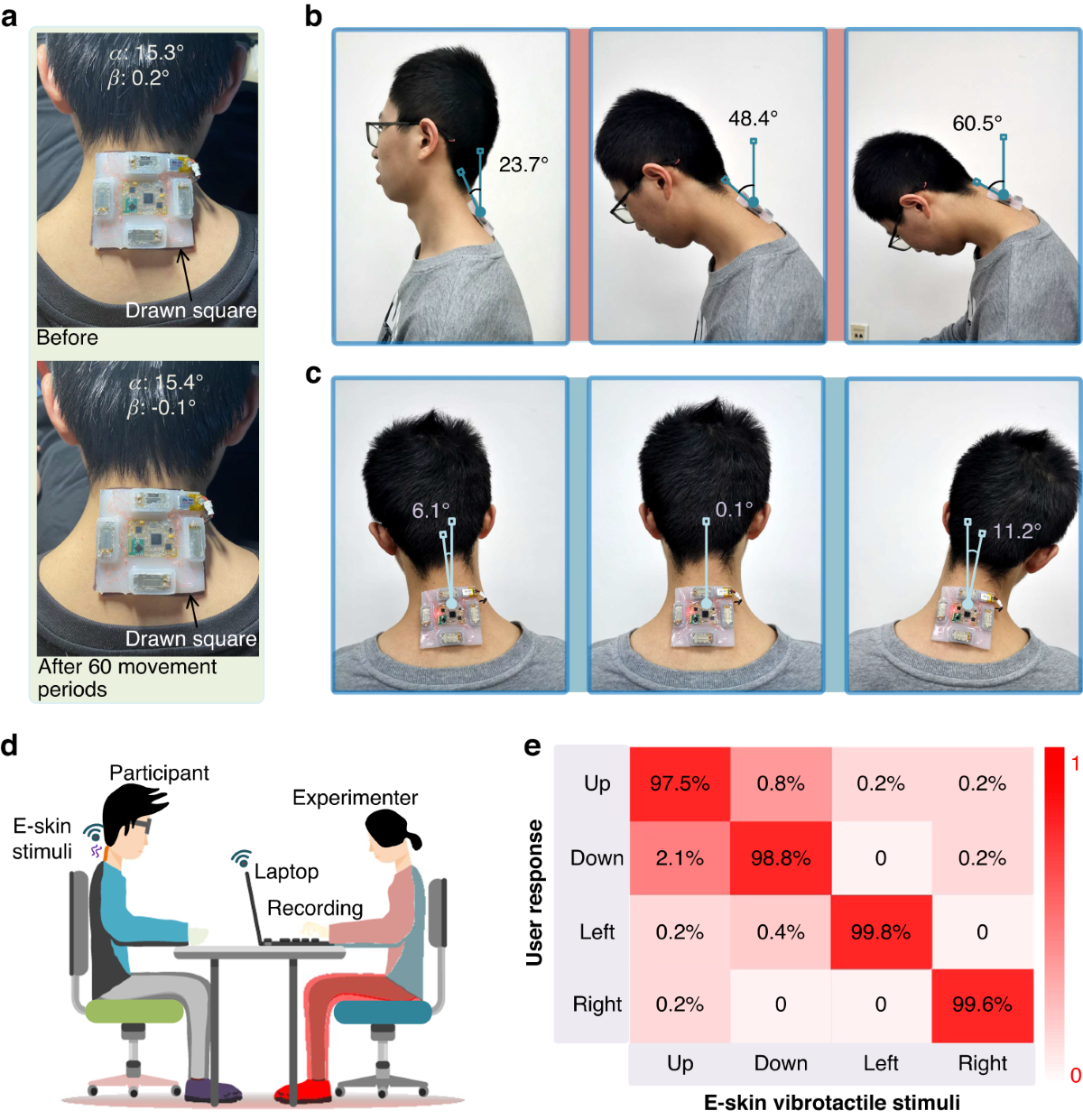
This project presents a wearable vest to monitor and prevent thoracic kyphosis by measuring spinal tilt angles using an MPU-6050 accelerometer. The system, which integrates an ESP32 microcontroller, provides real-time feedback to improve postural awareness and has been validated for clinical and ergonomic assessment.
José Miguel Hernández Ortega, Nabila Nuñez Alonso, Paula Rivero Robledo, José Ángel Zárate Fernández, Huber Girón Nieto, Ana Moreno Hernández
2025 IEEE Mexican Humanitarian Technology Conference (MHTC), 2025
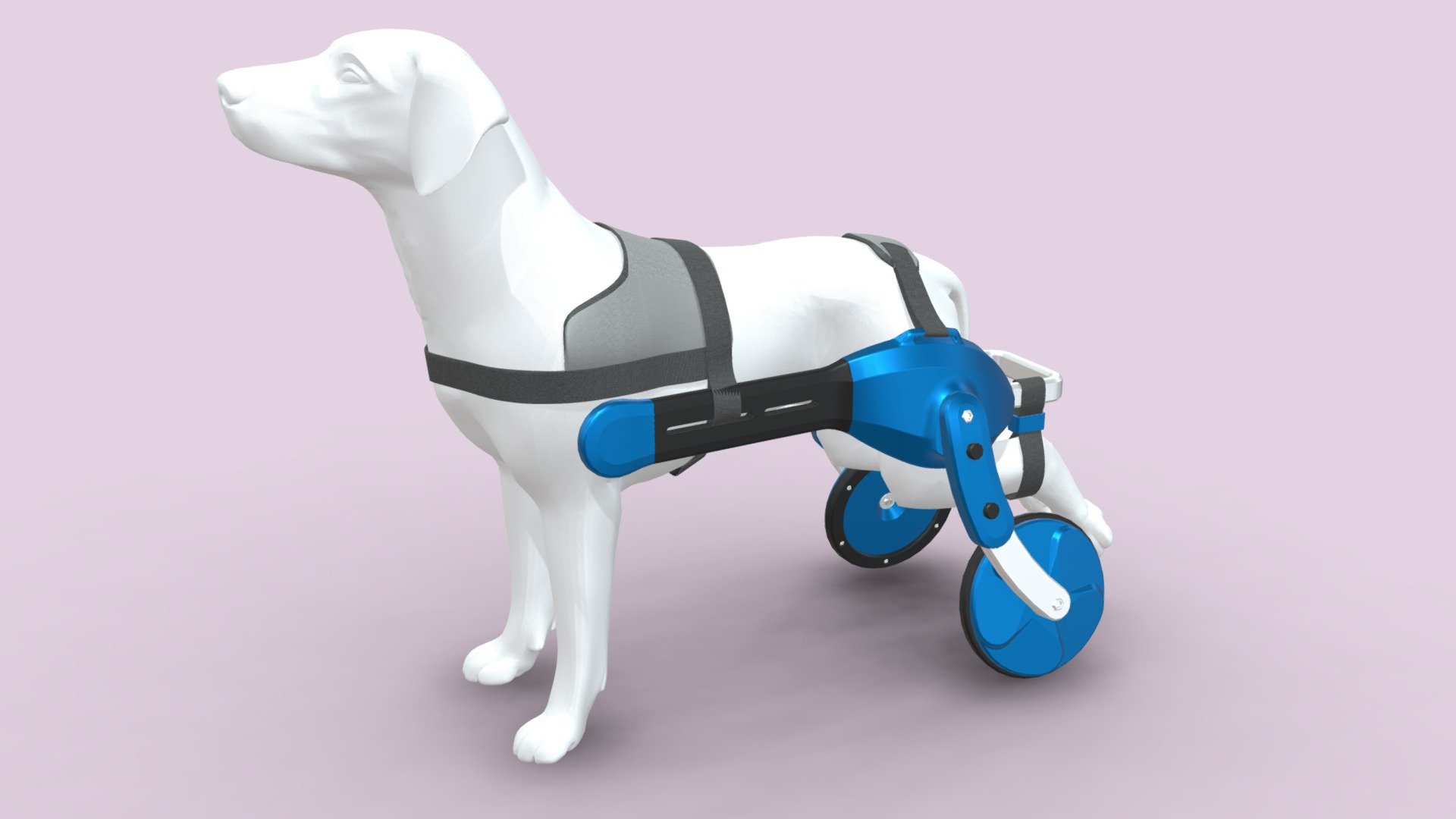
This study presents the design and manufacturing of a 3D-printed front limb wheelchair for dogs with congenital malformations. The modular and adjustable structure, made with PLA and TPU, enhances mobility and provides physical assistance, significantly improving the quality of life for animals with mobility impairments.

Kamil Gallardo Toledo, Derek Rodríguez Cancino, Emanuelle Garrido Javalera, Yael Alejandro Vásquez García, Huber Girón Nieto
2025 IEEE Mexican Humanitarian Technology Conference (MHTC), 2025
This study presents the development of a monitoring system to track and visualize key environmental parameters for amaranth cultivation. The system integrates an ESP32 microcontroller with DHT22, HD-38, and DS18B20 sensors to measure air and soil temperature, and humidity. The collected data is displayed in real-time, facilitating optimal crop management.

Oscar Guzmán Jorge, Carlos Gutiérrez Martínez, Luis Javier Vega Tello, Huber Giron Nieto, Máximo Nájera
2024 IEEE ANDESCON, 2024
The control and movement of automated robots is a fundamental field in mobile robotics. This system uses algorithms to guide robot navigation, ensuring the robot accurately follows a desired trajectory. Any deviation is progressively corrected, maintaining the course towards the destination.